




Color
Descripción
Descripción:
100% nuevo y de alta calidad
Material: componentes eléctricos
Color: Ver fotos
Características:
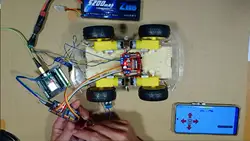
Quieres hacer un robot. Cuando veamos este chip, rápidamente nos tomamos cuenta de qué excelente complemento sería.
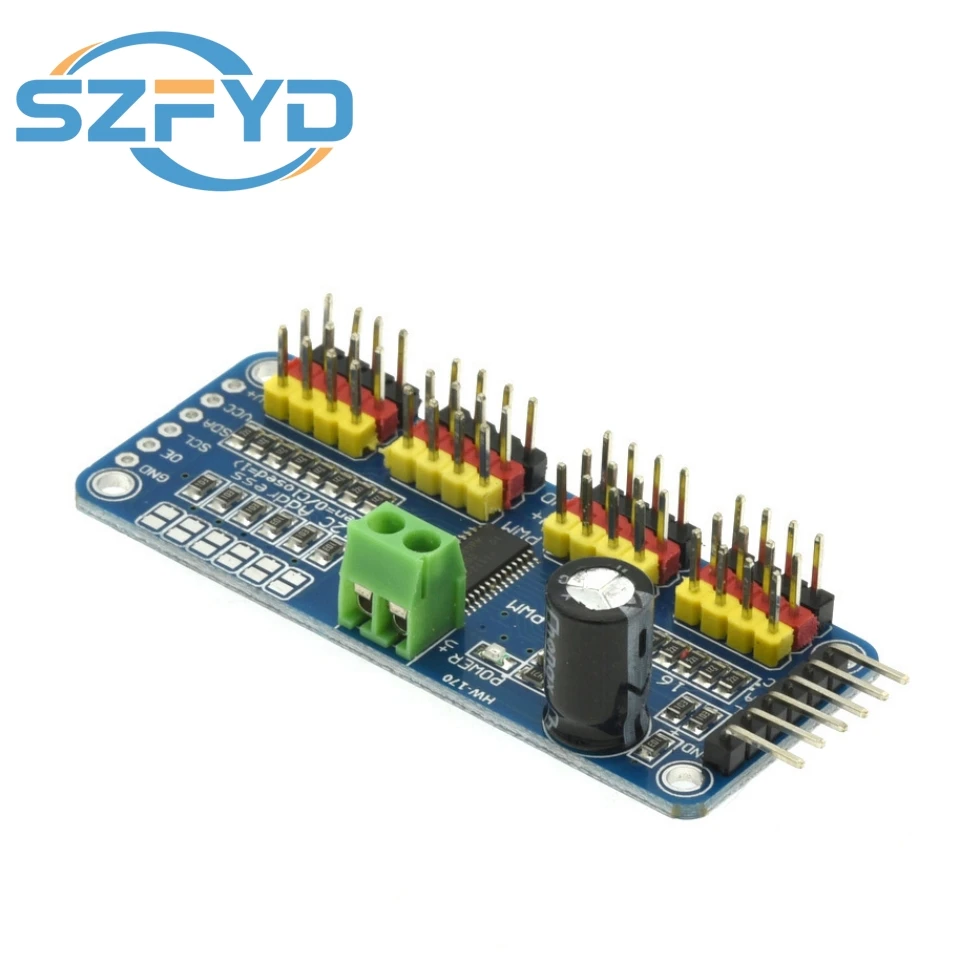
¡Usando solo dos pines, controle 16 salidas PWM de funcionamiento libre!
Entrada I2C, controla 16 salidas PWM, puedes controlar el servomotor de 16 vías.
Especificaciones:
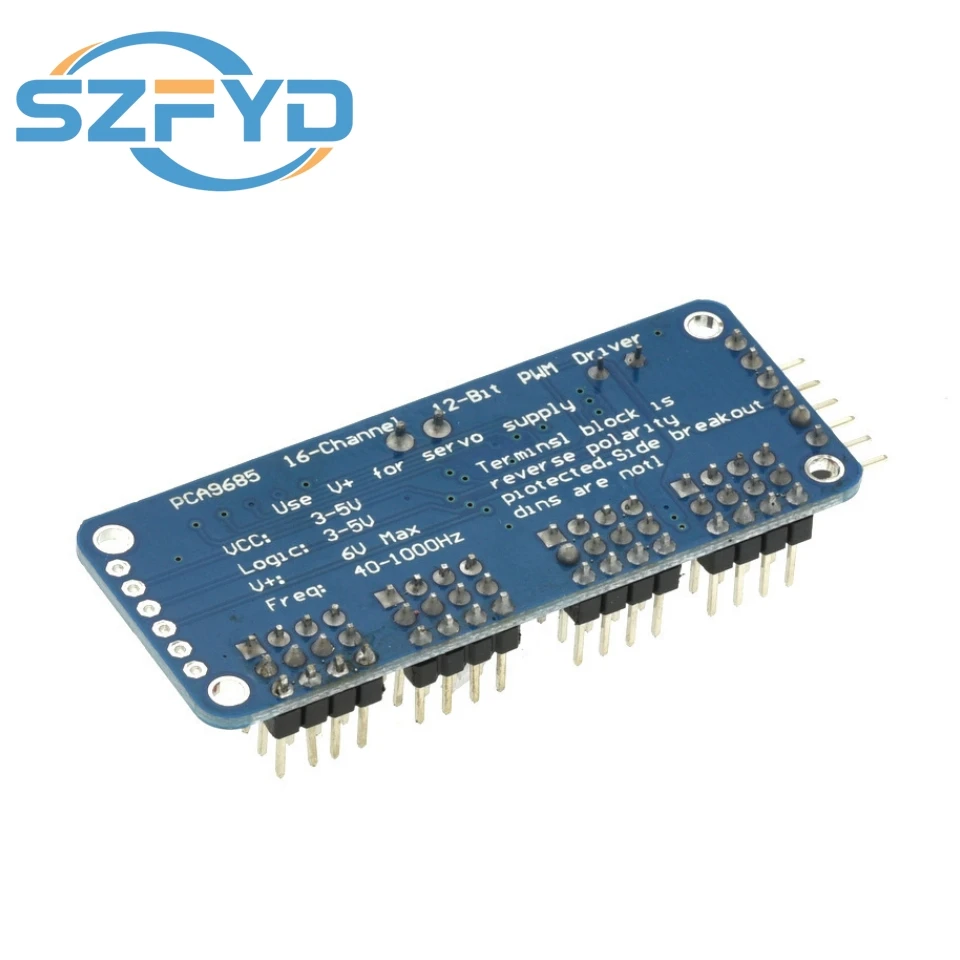
Frecuencia: 40-1000Hz.
Número de canal: 16 canales.
Resolución: 12 bits.
Voltaje: CC 5-10 V
Tamaño: 60*25mm/2,36"*0,98"
Sin paquete al por menor
Cantidad: 1 ud.
Nota: Debido a la diferencia entre diferentes monitores, es posible que la imagen no refleje el color real del artículo.¡Gracias!!
(1) Placa de unidad conectada a Arduino:
La placa controladora PWM utiliza el método I2C, por lo que solo se pueden conectar cuatro líneas al dispositivo Arduino:
Modo pin Arduino "Clásico":
+ 5v - VCC
GND - GND
Analógico 4 - SDA
Analógico 5 - SCL
Vía antigua de clavijas Mega:
+ 5v - VCC
GND - GND
Digital 20 - SDA
Digital 21 - SCL
R3 y posterior método de pin Arduino (Uno, Mega &
Leonardo):
(Estas placas tienen pines SDA y SCL dedicados)
+ 5v - VCC
GND - GND
SDA - SDA
SCL - SCL
El pin VCC es solo para la fuente de alimentación del chip, si desea conectar el servo o las luces LED, use la fuente de alimentación del pin V +, el pin V + admite una fuente de alimentación de 3,3 ~ 6 V (voltaje seguro del chip 5 V).Se recomienda conectar la fuente de alimentación externa a través del terminal de fuente de alimentación.
(2) parte de la fuente de alimentación:
La mayor parte del voltaje del diseño del servo es de 5 ~ 6 V, especialmente en varios mecanismos de dirección funcionando al mismo tiempo, con la necesidad de una fuente de alimentación de alta potencia.Si está utilizando directamente el pin Arduino de 5 V para alimentar el servo directamente, existen algunos problemas impredecibles, por lo que le recomendamos que tenga una fuente de alimentación externa adecuada para la placa de control.
(3) Conecte el servo:
La mayoría de los servos se conectan mediante enchufes hembra estándar de 3 cables, siempre que el pin correspondiente esté en la placa del controlador.(El cable de tierra generalmente es negro o marrón, la línea de señal generalmente es amarilla o blanca)
(4) para la dirección asignada de la placa del controlador:
Cada placa controladora de la cascada debe tener una dirección de acceso única.La dirección I2C inicial de cada placa de controlador es 0 × 40, puede modificar la esquina superior derecha de la dirección I2C del puente.Conecte un puente con soldadura para indicar un número binario "1".
El paquete incluye:
1 Unidad x PCA9685 Módulo I2C de controlador de servomotor PWM de 16 canales y 12 bits para Robot Arduino
Opiniones de clientes
20 opinionesTengo un vídeo explicando el funcionamiento e instalación de este dispositivo. Es el que uso para las prácticas de mis alumnos. Si buscas ElectroJaime te saldrá mi canal. Espero que os sirva de ayuda y si teneís alguna duda me lo comentaís. Un saludo.
Tengo un vídeo explicando el funcionamiento e instalación de este dispositivo. Es el que uso para las prácticas de mis alumnos. Si buscas ElectroJaime te saldrá mi canal. Espero que os sirva de ayuda y si teneís alguna duda me lo comentaís. Un saludo.
Tengo un vídeo explicando el funcionamiento e instalación de este dispositivo. Es el que uso para las prácticas de mis alumnos. Si buscas ElectroJaime te saldrá mi canal. Espero que os sirva de ayuda y si teneís alguna duda me lo comentaís. Un saludo.
Tengo un vídeo explicando el funcionamiento e instalación de este dispositivo. Es el que uso para las prácticas de mis alumnos. Si buscas ElectroJaime te saldrá mi canal. Espero que os sirva de ayuda y si teneís alguna duda me lo comentaís. Un saludo.
Bueno
OK
Ya lo probé y funciona de maravilla.
Se ve bien
Gracias, una transacción fluida y agradable, con gusto volvería a hacerlo en cualquier momento. 😊





